

GM Says Self-Driving Vehicle Technology to be Available by Decade’s End
DETROIT - General Motors’ Vice President of Global Research and Development Alan Taub commented on autonomous vehicle development during the Intelligent Transport Systems World Congress in Orlando.

This diagram from GM shows how a range of technologies will work together to enable autonomous driving.
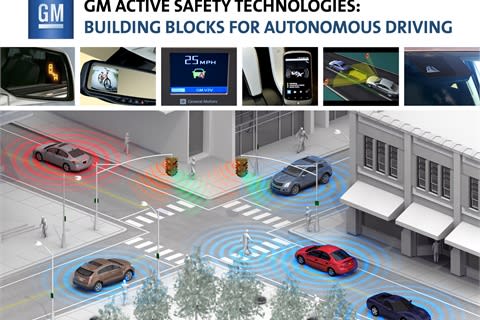
This diagram from GM shows how a range of technologies will work together to enable autonomous driving.
DETROIT – General Motors’ Vice President of Global Research and Development Alan Taub said technologies that enable vehicles to drive themselves will be available by the end of the decade. He added that vehicles that partially drive themselves will be available by the middle of the decade.
Taub made these comments to the Intelligent Transport Systems World Congress in Orlando on Sunday, Oct. 16. He said that these new technologies are being built on leading-edge active safety systems. Technologies such as sensors, radar, portable communication devices, GPS, and cameras provide information about the vehicle and its surroundings to a vehicle’s computer system and the driver.
“The technologies we’re developing will provide an added convenience by partially or even completely taking over the driving duties,” Taub said. “The primary goal, though, is safety. Future generation safety systems will eliminate the crash altogether by interceding on behalf of drivers before they’re even aware of a hazardous situation.”
GM said it’s already including a number of these safety systems in its vehicles. A lane departure warning system is available on the Chevrolet Equinox and GMC Terrain; the Cadillac Escalade, GMC Yukon, Chevrolet Tahoe, and Suburban all offer an available side blind-zone alert. A number of GM vehicles, including the Equinox and Terrain, offer back-up cameras.
The automaker said additional advanced safety systems in development that will provide the foundation for autonomous driving including the following:
Crash Avoidance: A crash avoidance system available on the 2012 GMC Terrain uses a camera to help drivers avoid front-end and lane departure crashes. The system uses a high-resolution digital camera mounted on the windshield ahead of the rearview mirror to look for shapes of vehicles and lane markings, alerting the driver to possible collisions and lane departures.
V2V and V2I Systems: Vehicle-to-vehicle and vehicle-to-infrastructure communication systems gather information from other vehicles, roadways, and traffic signals to warn drivers about possible hazards ahead. For example, slowed or stalled vehicles, hard-braking drivers, slippery roads, sharp curves, and upcoming stop signs and intersections. These systems, on display this week at the ITS World Congress, can be embedded in the vehicle or be added as applications to portable devices/smartphones that connect wirelessly to the vehicle.
The EN-V urban mobility concept combines GPS with vehicle-to-vehicle communications and distance-sensing technologies to enable autonomous driving. The EN-V’s capabilities, which GM said are being demonstrated at the ITS World Congress, includes pedestrian detection, collision avoidance, platooning, and automated parking and retrieval, where the EN-V drops off its driver, parks itself and then returns to pick up the driver via commands from a smartphone.
With regard to autonomous vehicle system development, GM worked with Carnegie Mellon University to develop the “The Boss” Chevrolet Tahoe that brought autonomous vehicle operation to life in 2007 and won the DARPA Urban Challenge.
The event required teams to build a driverless vehicle capable of driving in traffic and performing complex maneuvers such as merging, passing, parking, and negotiating intersections over a 60-mile course.
More Safety

Ram Recalls More Than 1.27 Million 1500 Pickups for Seat Belt Anchor Issue
The recall affects certain 2019-2026 Ram 1500 pickups that may have improperly attached second-row seat belt buckle anchors.
Read More →
Top 50 Executive Fleets
It is that time of year again! Time for the 2026 list of the Top 50 Executive Fleets, presented by Automotive Fleet and Volvo as part of its annual Fleet 500. Download now to see this year's list of companies!
Read More →
How Better Visibility Cut Speeding Violations by 48%
Fleet leaders don't need more data, they need clearer visibility into what the data is saying. This case study explores how one utility replaced speeding-event counts with a single metric — miles driven in violation — to strengthen safety and significantly reduce speeding violations.
Read More →
Operation Safe Driver Week: Why the Industry's Oldest Safety Campaign Still Matters to Fleets
A look at how a 2007 enforcement initiative became one of the most consequential weeks on the fleet safety calendar, and what it means for your drivers in 2026.
Read More →
Nexar-Nauto Merger Aims to Give Fleets Better Safety Intelligence Through Larger Driving Dataset
Stefan Heck tells Automotive Fleet that combining more than 10 billion miles of driving history with Nexar's AI models will give fleets deeper insights into driver risk and roadway conditions than either company could provide independently.
Read More →
From Silos to Solutions: Relationship Management for Safer Fleets
From telematics adoption and driver accountability to policy consistency and risk mitigation, this episode breaks down what it really takes to build a safer fleet culture without slowing business down.
Read More →
IIHS Launches First Commercial Vehicle Safety Evaluations
The Insurance Institute for Highway Safety has begun evaluating heavy-duty pickups and cargo vans for driver protection. Which models earned top marks?
Read More →
Reducing Risk by Eliminating Phone Use Behind the Wheel
Hosted with the cofounder of Lifesaver Mobile, this episode addresses phone use behind the wheel and how to design a driving environment that actually helps prevents accidents.
Read More →
Cameras, Safety and Insurance: From Reactive Claims to Real-Time Prevention (Part 2 of 2)
Part Two: Commercial auto remains one of the most challenging and costly lines of coverage for fleet operators and insurers alike. Continue learning more about how to effectively address these issues from Onur Aksan, Enterprise Business Development Executive, Geotab
Read More →
How 5-Second Telematics Data Is Changing Fleet Safety
This episode connects with Steve Santostasi of Ford Pro and covers how a few seconds of data can make a difference in fleet safety.
Read More →