

2013 Cadillac XTS to Feature Active Safety & Driver Assistance System
DETROIT – The all-new 2013 Cadillac XTS introduces an advanced active safety and driver assistance system. According to General Motors, the system represents a significant milestone toward the development of self-driving vehicles.

2013 Cadillac XTS
DETROIT – The all-new 2013 Cadillac XTS introduces an advanced active safety and driver assistance system. According to General Motors, the system represents a significant milestone toward the development of self-driving vehicles.

2013 Cadillac XTS
Coming this fall to XTS, the available Driver Assistance Package is the first General Motors system of its kind to use sensor fusion, which enables integration of a broad range of sensing and positioning technologies that can alert drivers of road hazards and help them avoid crashes.
The system’s use of radar, cameras and ultrasonic sensors enables advanced safety features, including:
Rear Automatic Braking
Full-Speed Range Adaptive Cruise Control
Intelligent Brake Assist
Forward Collision Alert
Safety Alert Seat
Automatic Collision Preparation
Lane Departure Warning
Side Blind Zone Alert
Rear Cross Traffic Alert
Adaptive Forward Lighting
Rear Vision Camera With Dynamic Guidelines
Head Up Display
“We believe sensor fusion will enable future active safety systems to handle a greater number of inputs to provide 360 degrees of crash risk detection and enhanced driver assist features,” said Bakhtiar Litkouhi, GM research and development lab group manager for perception and vehicle control systems.
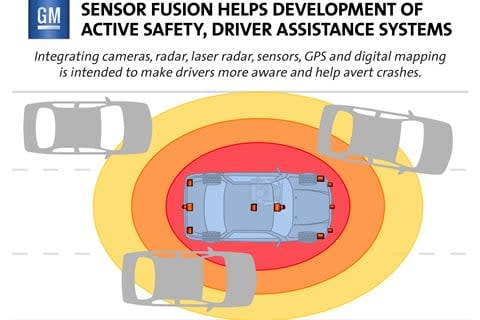
GM Sensor Fusion
“A system that combines the strengths of multiple sensing technologies and expertly manages those inputs can provide advisory, warning and control interventions to help drivers avoid collisions and save lives,” Litkouhi said.
Sensor fusion also is a building block in the development of semi-autonomous and fully autonomous vehicles, which are designed to maintain lane position and adapt to traffic environments. More sophisticated self-driving technology, which could enable semi-autonomous and fully autonomous driving, is expected by the end of the decade.
GM’s work on sensor fusion draws on its experience with The Boss, a fully autonomous Chevrolet Tahoe developed by GM, Carnegie Mellon University and other partner companies, and named for GM R&D founder Charles F. “Boss” Kettering. In 2007, The Boss navigated 60 miles of urban traffic, busy intersections and stop signs in less than six hours to win the Defense Advanced Research Projects Agency (DARPA) Urban Challenge competition.
Sensor fusion development also is bolstered by GM’s work on the EN-V, three semi-autonomous electric concept vehicles unveiled at the 2010 Shanghai World Expo. By combining GPS with vehicle-to-vehicle communications, distance-sensing and object detection technologies, EN-V can be driven both manually and autonomously -- the latter allowing it to automatically select the fastest route based on real-time traffic information.
Among the technologies that GM is considering to develop for future active safety systems is LIDAR, a light detecting and ranging technology that can measure the distance to a vehicle or object by illuminating it, often using pulses from a laser. Although LIDAR is no replacement for driver vision, it can become another set of eyes when visibility has deteriorated due to inclement weather or darkness. When combined with radar, cameras and ultrasonic sensors, LIDAR has potential crash avoidance capability.
A more advanced positioning system, using more accurate GPS and digital mapping, also is expected to play an important role on future active safety systems because it helps locate vehicles in relation to one another. While GPS effectiveness can be limited in urban canyon environments where high-rise buildings can interfere with satellite signals, the technology is still considered an asset when “fused” with other sensing and positioning technologies.
“No sensor working alone provides all the needed information. That’s why multiple sensors and positioning technologies need to work together synergistically and seamlessly,” Litkouhi said. “Sensor fusion will help facilitate that.”
More Safety

How Better Visibility Cut Speeding Violations by 48%
Fleet leaders don't need more data, they need clearer visibility into what the data is saying. This case study explores how one utility replaced speeding-event counts with a single metric — miles driven in violation — to strengthen safety and significantly reduce speeding violations.
Read More →
Operation Safe Driver Week: Why the Industry's Oldest Safety Campaign Still Matters to Fleets
A look at how a 2007 enforcement initiative became one of the most consequential weeks on the fleet safety calendar, and what it means for your drivers in 2026.
Read More →
Nexar-Nauto Merger Aims to Give Fleets Better Safety Intelligence Through Larger Driving Dataset
Stefan Heck tells Automotive Fleet that combining more than 10 billion miles of driving history with Nexar's AI models will give fleets deeper insights into driver risk and roadway conditions than either company could provide independently.
Read More →
From Silos to Solutions: Relationship Management for Safer Fleets
From telematics adoption and driver accountability to policy consistency and risk mitigation, this episode breaks down what it really takes to build a safer fleet culture without slowing business down.
Read More →
IIHS Launches First Commercial Vehicle Safety Evaluations
The Insurance Institute for Highway Safety has begun evaluating heavy-duty pickups and cargo vans for driver protection. Which models earned top marks?
Read More →
Reducing Risk by Eliminating Phone Use Behind the Wheel
Hosted with the cofounder of Lifesaver Mobile, this episode addresses phone use behind the wheel and how to design a driving environment that actually helps prevents accidents.
Read More →
Cameras, Safety and Insurance: From Reactive Claims to Real-Time Prevention (Part 2 of 2)
Part Two: Commercial auto remains one of the most challenging and costly lines of coverage for fleet operators and insurers alike. Continue learning more about how to effectively address these issues from Onur Aksan, Enterprise Business Development Executive, Geotab
Read More →
How 5-Second Telematics Data Is Changing Fleet Safety
This episode connects with Steve Santostasi of Ford Pro and covers how a few seconds of data can make a difference in fleet safety.
Read More →
Managing Road Risk at Scale: Why Fleet Safety Needs a Data-Driven Framework
Insights from the FIA Road and Driver Safety Indexes reveal how to manage road risk on a larger scale.
Read More →
Stellantis Recalls 1.3 Million Jeep Vehicles Worldwide Over Fire Risk
Stellantis is recalling more than 1.3 million Jeep Wrangler and Gladiator models worldwide over a fire risk linked to power steering pump wiring.
Read More →